解决方案
机器人编程
机器人离线编程允许您为各种过程编程工业机器人,而不会中断生产。使用您的3D CAD数据在计算机上创建高效、无错误的机器人程序,然后下载到物理机器人上。
更快的机器人投资回收期
在不影响生产的情况下,将机器人编程速度提升10倍。确保机器人快速投入运行,并将停机时间降至最低。保存并复用您的程序以供未来项目使用,从而提高效率和生产力。
提高生产效率
通过优化机器人的运动轨迹和工艺流程,在最大限度减少机器人停机时间的同时,实现最高效率和精度,从而确保产品始终符合最高质量标准。
支持面向制造的设计
避免在最后关头对夹具和工装进行修改。应在实际生产开始前充分测试并调整机器人工作站和生产布局的虚拟模型。
为什么要离线编程机器人?
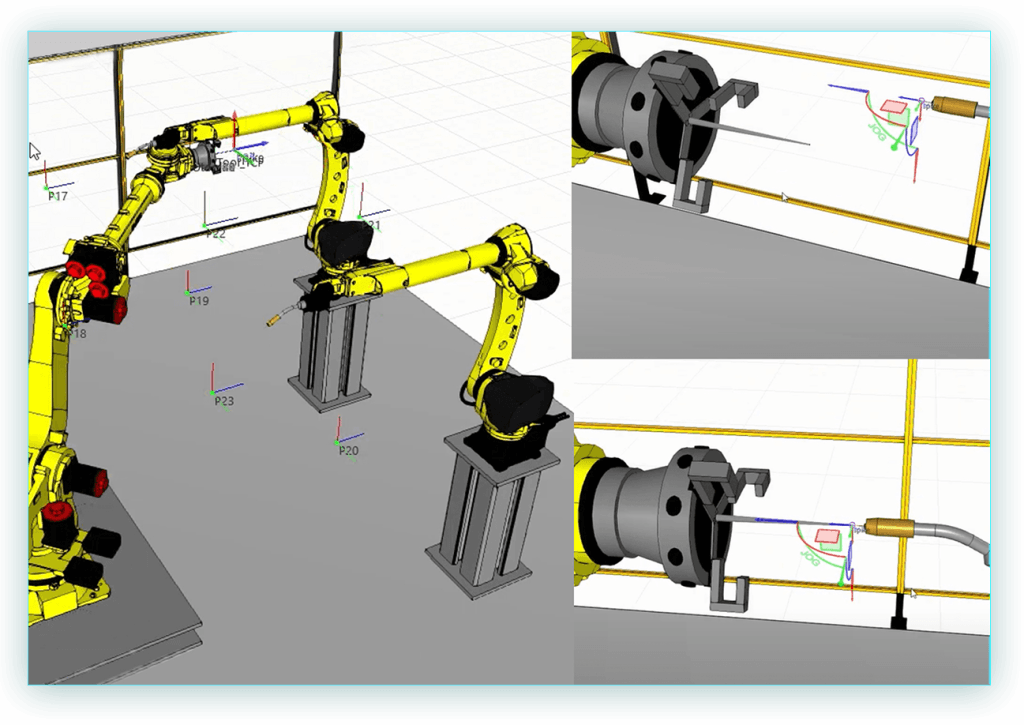
试想一下,要编程让一个机器人将一个圆形部件焊接到金属工件上。机器人需要沿部件周长以三维弧线移动焊枪,同时保持焊枪相对于工件表面的精确方位。
什么是机器人离线编程?
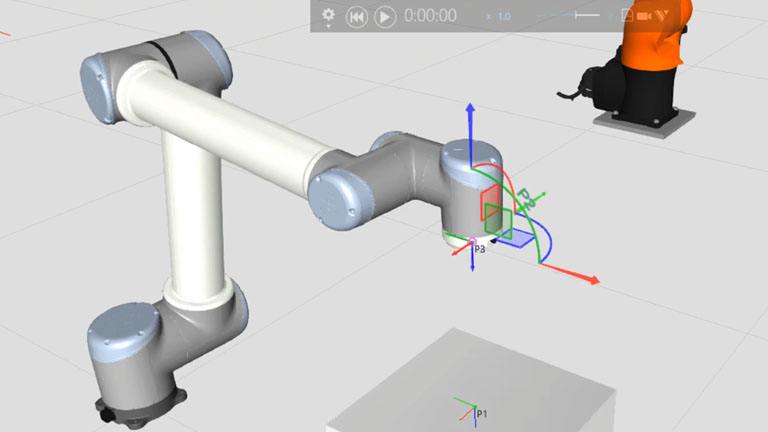
机器人离线编程是一种无需直接操作实体机器人或干扰生产即可对机器人进行编程的方法。通过使用机器人及其环境的虚拟模型,您可以在数字空间中规划、编程和优化机器人任务。
在验证程序的准确性和安全性后,将其下载至机器人控制器以供执行。这种方法缩短了编程时间,提高了精度,并通过避免在编程期间暂停作业,最大限度地延长了生产运行时间。
这对预先规划复杂的机器人操作至关重要,既能确保效率,又能降低风险。使用机器人编程软件的制造商表示,机器人编程时间减少了80%,机器人利用率提高了95%。
机器人编程的发展
多年来,机器人编程技术已取得了长足进步。最初,机器人是通过手动将机械臂移动到目标位置来编程的。20世纪80年代,CAD技术的出现使得机器人仿真和离线编程成为可能,能够将CAD数据转换为机器人运动程序。
如今,现代机器人编程软件支持多种机器人,并具备自动化编程和碰撞解决功能,从而提高了效率和精度。机器人工作单元的校准确保虚拟模型与实际工作单元相匹配,从而实现数字孪生。
最早的工业机器人是通过一种称为“示教”的方法进行编程的。在这种方法中,将机械臂物理移动到所需位置,并保存该姿态——包括工具中心点(TCP)的x、y、z坐标及其旋转角度。本质上,这涉及记录每个关节电机的位置,从而定义机器人的运动轨迹。
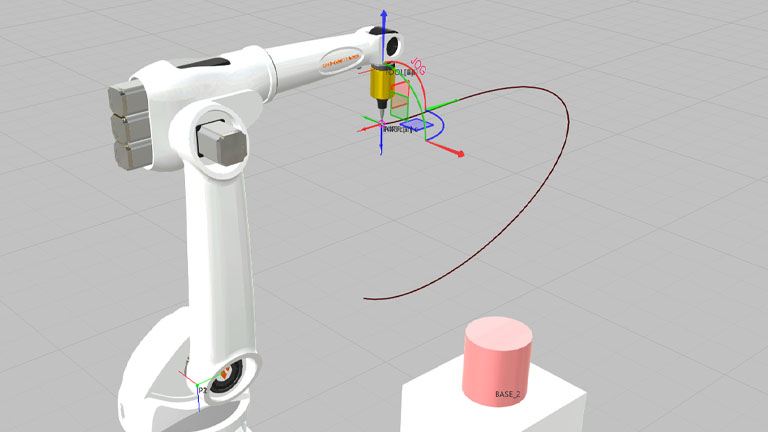
机器人仿真技术始于20世纪80年代,利用CAD技术对机器人、其运动轨迹以及周围的工作单元或环境进行可视化呈现。不久之后,人们开发出了将CAD程序中的位置数据转换为机器人运动程序的技术,这与为数控机床生成加工路径的过程非常相似。这一创新标志着机器人离线编程时代的到来。
如今,机器人离线编程主要有两种形式。许多机器人制造商除了提供示教器外,还会配套提供专有编程软件。此外,用户还可以选择独立的机器人离线编程解决方案,这类方案不依赖特定品牌,能够支持不同制造商生产的多种机器人。
机器人离线编程的有效性在很大程度上取决于CAD模型对实际工作单元的还原精度。为了弥合虚拟模型与物理布局之间的差距,用户必须进行机器人工作单元校准。这包括测量工作单元中的关键参考点,采集机器人工具中心点(TCP)的实际姿态,并确定外围设备的定位。这些测量数据会被输入到机器人的离线编程软件中,该软件通过校准程序将CAD模型与实际布局对齐,从而构建数字孪生。测量工作既可以利用机器人本身作为测量工具,也可以借助3D激光扫描仪等外部设备来完成。
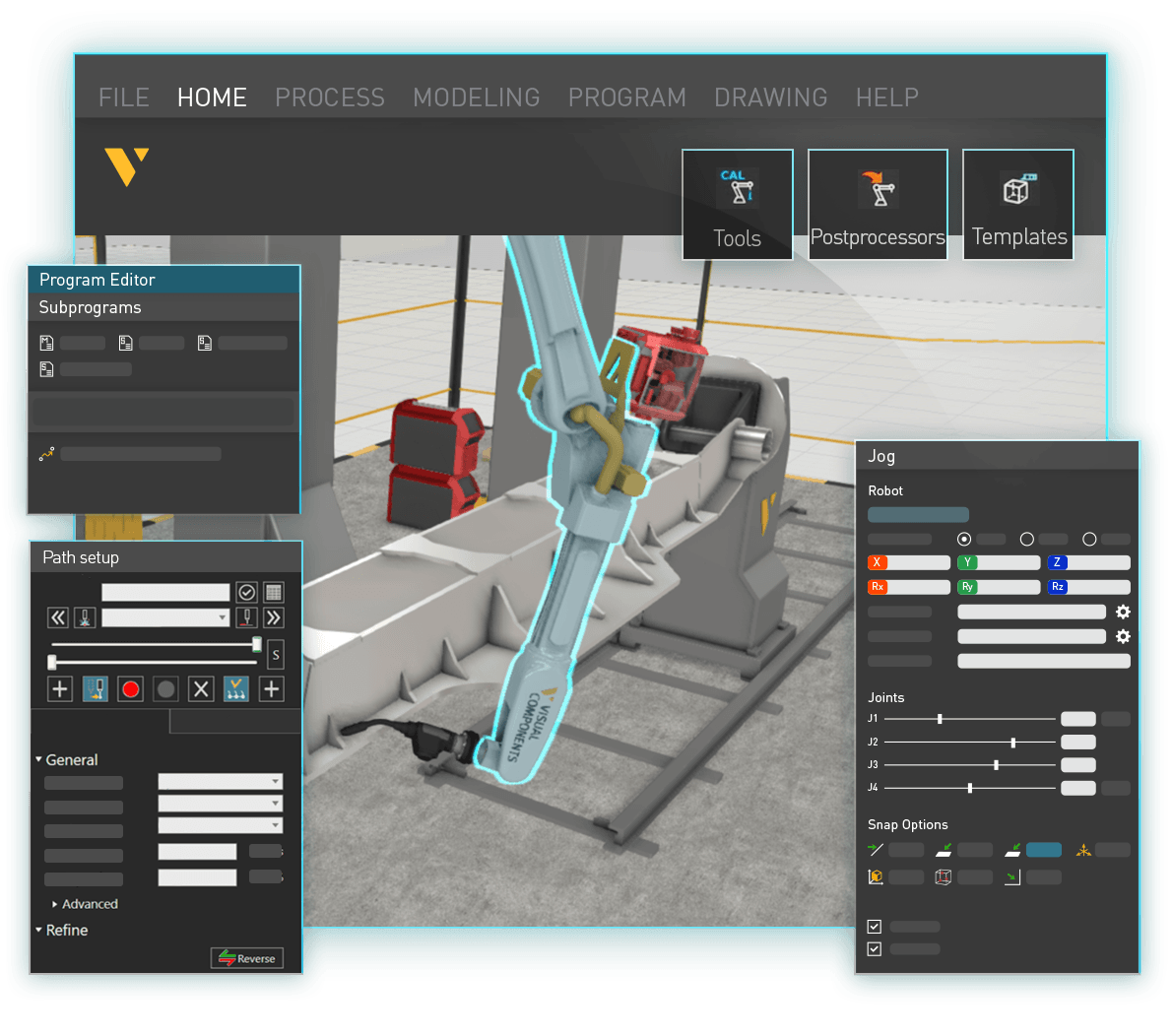
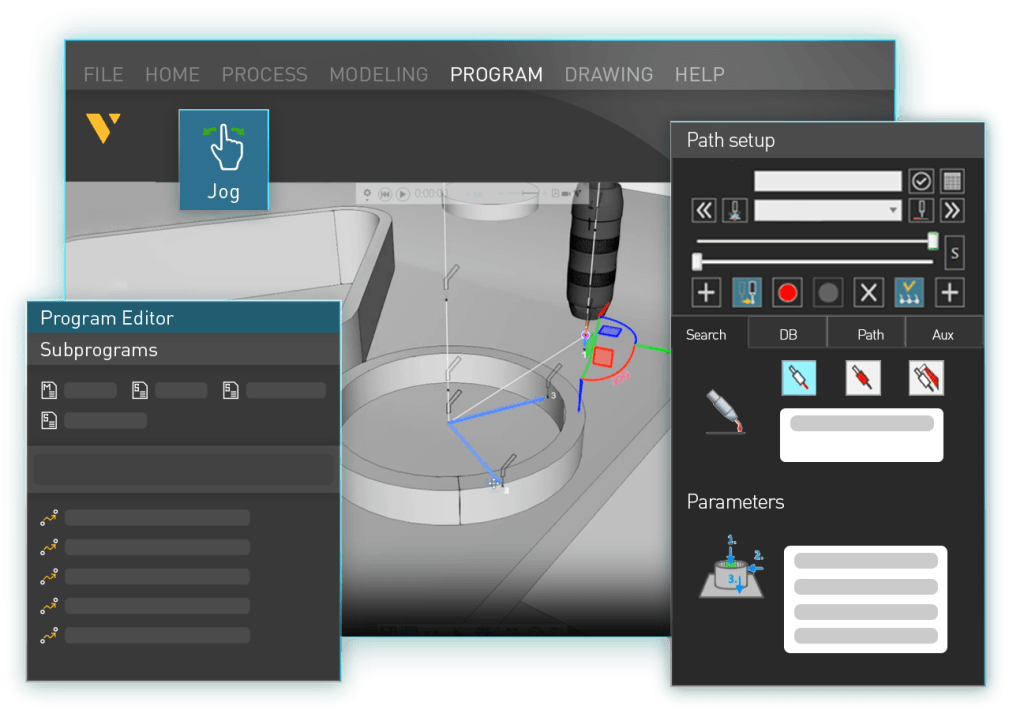
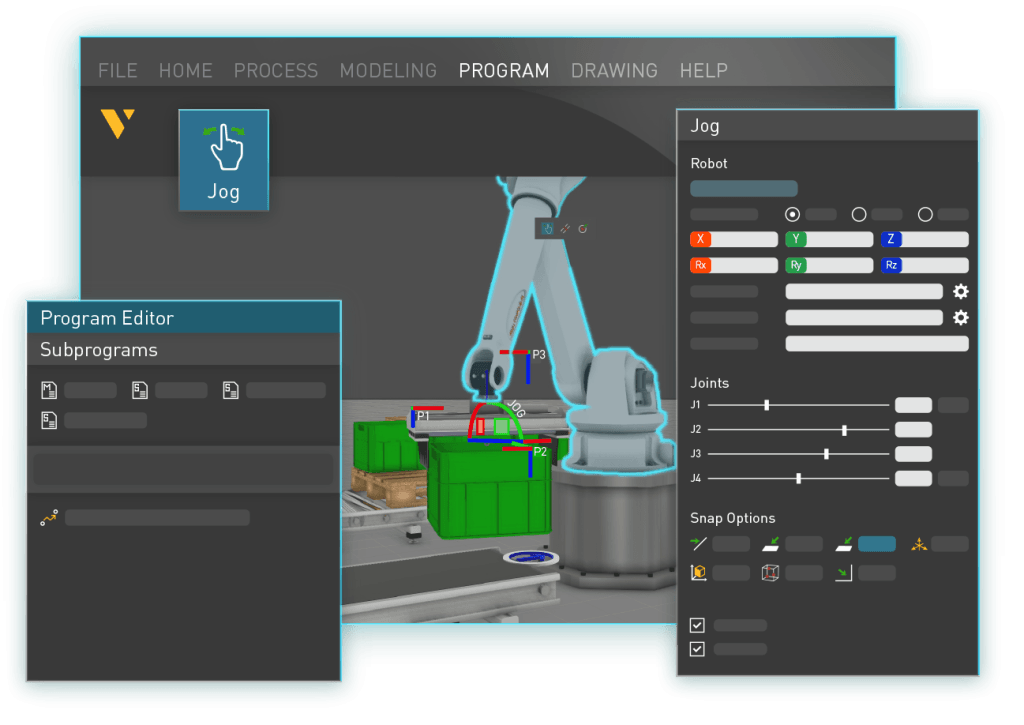
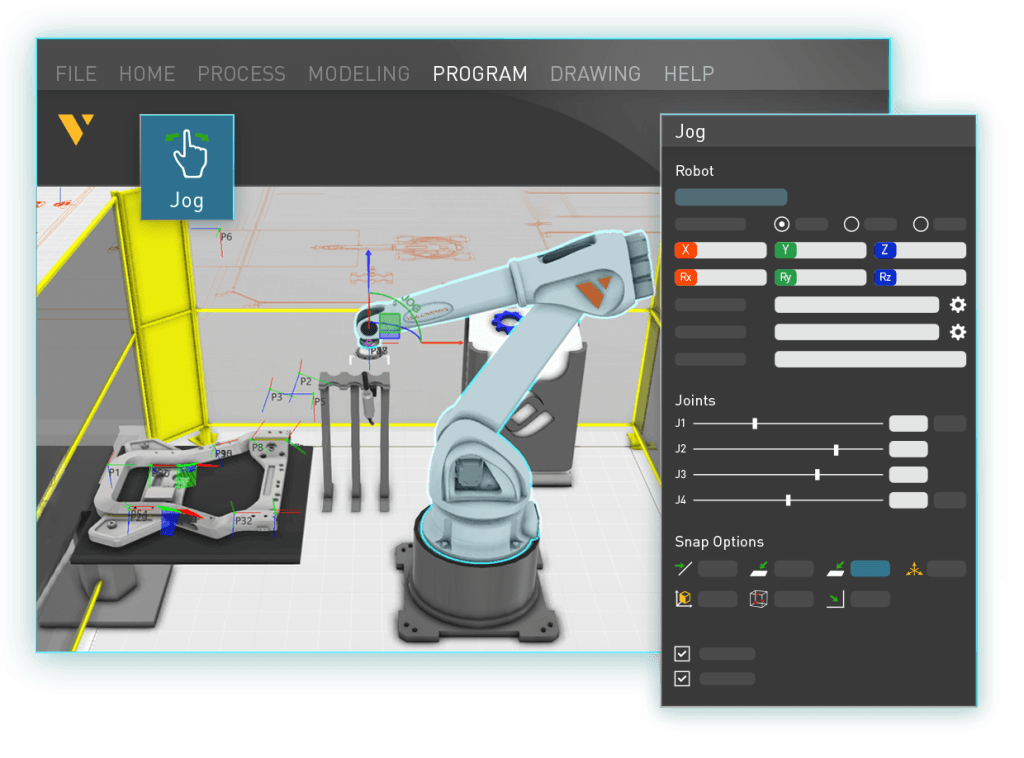
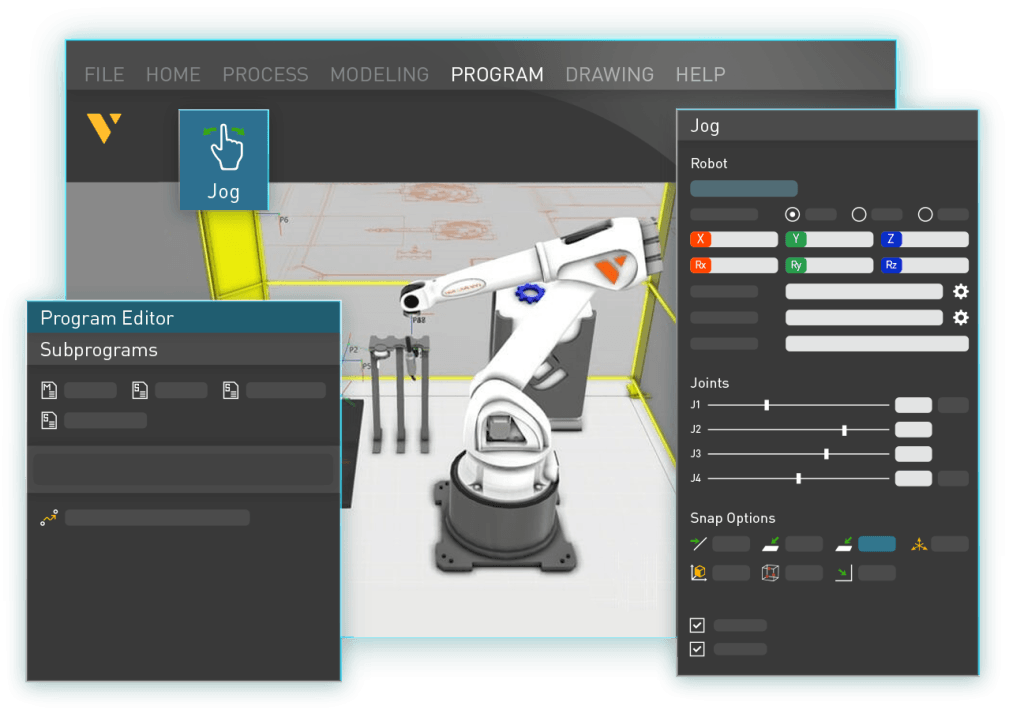
使用 Visual Components 进行机器人编程
机器人编程不应复杂、重复或耗时。机器人编程软件应提升生产灵活性和适应性,并确保以高精度实现可重复的质量。
Visual Components 提供最快、最简便的离线编程软件,支持各类自动化水平。从一键编程到全自动的基于模型的定义(MBD),该软件兼容所有主流工业机器人品牌、工艺流程及复杂程度。这有助于您最大限度地提升产品质量、机器人利用率及生产产量。
机器人编程选项
在线编程
Pros:
- “免费”,无需软件投资
Cons:
- 生产和机器人停机时间
- 复杂且耗时
- 独特的编程语言
- 质量不稳定
- 安全与无障碍
离线编程解决了与示教器编程相关的许多难题。它既能避免生产中断,又方便、安全、快捷,且兼容不同品牌的机器人。该方案可从产品设计阶段开始,利用CAD文件进行编程,从而确保更高的灵活性和效率。
基于机器视觉的编程
优点:
- 实时信息交换
- 无需特定位置或固定装置
缺点:
- 仍需进行机器人编程
- 在非受控环境中的不准确性和不可靠性
- 只有在某些部件制造完成后才能开始
- 仅限于简单部件
离线编程提供了一种更可靠且用途更广泛的解决方案,可在不影响生产的情况下,实现精准且一致的加工效果。它不仅适用于简单零件,还能从产品设计阶段开始利用CAD文件进行编程,从而提供更大的灵活性和效率。
机器人离线编程
优点:
- 不停止生产
- 便捷、安全、快速
- 第三方 OLP 软件支持不同品牌的机器人,提供了更大的灵活性
- 可以从产品设计阶段开始,直接使用CAD文件
缺点:
- 需要CAD文件
- 厂商专用的OLP软件仅支持其自有机器人,从而限制了兼容性
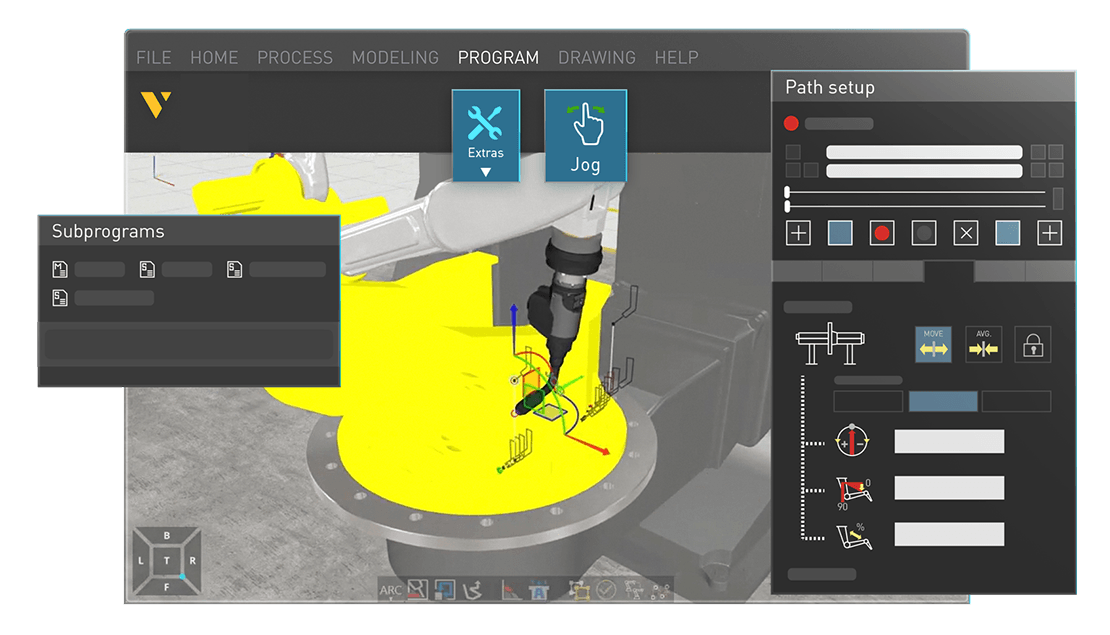
常见的离线编程应用有哪些?
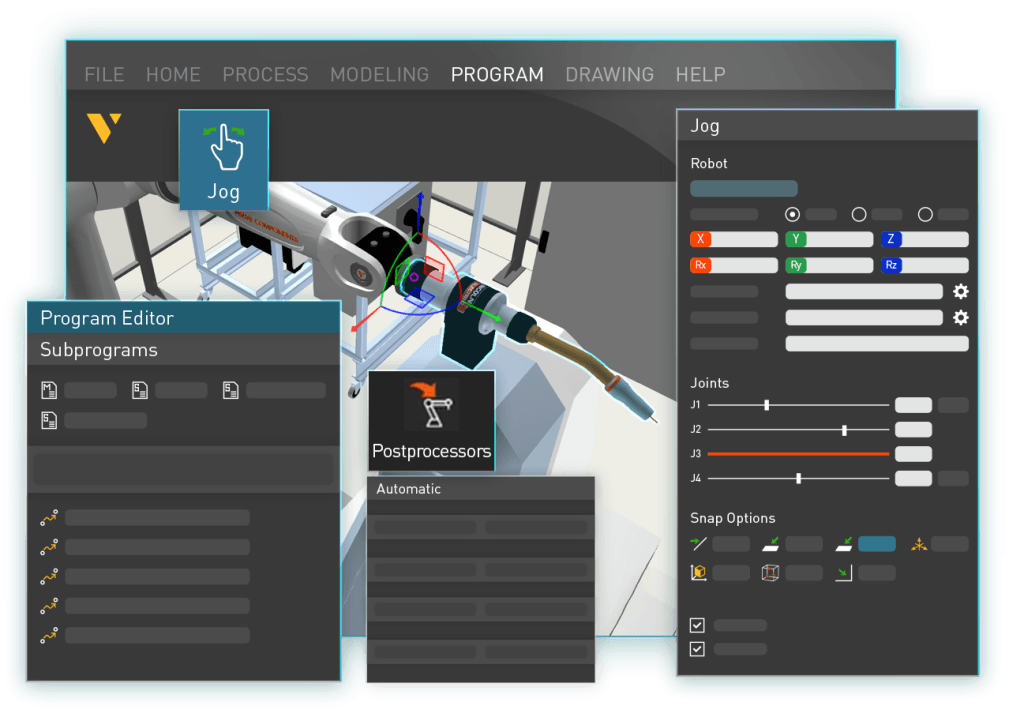
可达性和定位是机器人离线编程能够有效解决的两大难题。例如,复杂的焊缝可能需要大量焊点。

面向机器人程序员
节省手动机器人编程和返工的时间,让您能够专注于更重要的任务。
面向制造工程师
在投产前,轻松进行协作并验证设计和工装的可行性。

面向生产经理
无需停产即可节省10倍的编程时间。最大限度地提升质量、机器人利用率和产量。

面向机器人行业管理者
最大限度地提高质量、机器人利用率和生产效率,以缩短机器人投资的回收期。
面向系统集成商
轻松创建数字孪生,在交付前优化方案以确保准确性。通过提供优质服务并赢得客户满意度,保持市场竞争力。
常见问题解答
这种观点源于一种假设,即只有大规模生产才能从单件流生产(OLP)中获益。但实际情况却略有不同。当生产批次较小、设备调试或换线频繁、且任务种类繁多时,单件流生产(OLP)尤其能发挥优势。如果中小型制造商采用小批量生产模式,单件流生产(OLP)将能为他们带来巨大效益。
与任何软件一样,OLP 需要一定的培训,且存在学习曲线。此外,某些 OLP 产品可能并不特别用户友好。不过,优质的产品通常直观、逻辑清晰且易于使用,能让新手用户快速掌握。此外,切勿低估通过机器人示教器进行编程的复杂性。不同品牌的机器人使用不同的指令,而且随着机器人型号从旧款更新至新款,系统也会随之变化。这使得手动编程变得更加复杂。
OLP 软件需要额外购买。不过,该软件只需购买一次,即可支持该设施使用的任何品牌的机器人。(这也有助于该设施避免被绑定在单一机器人供应商身上。)OLP 用户反馈称,由于停机时间减少、机器人利用率提高,其机器人单元的投资回报率得到了提升。有证据表明,该软件可将因编程导致的机器人停机时间减少多达 90%,并且仅需一个项目即可收回成本。
OLP软件的用户反馈了多项优势:
机器人无停机时间
编程时间可减少高达80%,机器人利用率可提高多达95%,从而提升编程人员的工作效率并减少生产单元的停机时间。
快速设置
将新产品投入生产所需的时间更短——编程工作是并行进行的,而非顺序进行。
加强工作场所安全
降低事故和受伤的风险。
更优且稳定的质量
机器人程序经过了更好的优化(周期时间更短、精度更高且一致性更强),从而实现了更高且可重复的生产质量。
不依赖特定机器人品牌和工艺
无论机器人品牌或工艺类型如何,先进的OLP软件都能满足所有应用需求。
避免返工和延误
避免在最后时刻对夹具和模具进行修改。
OLP 软件能够加快程序开发速度,缩短编程所需时间,但并不能取代专业程序员的作用。路径规划与优化、避障等功能,最好还是由经验丰富的程序员来完成。不过,OLP 软件可以提高他们的工作效率,使他们有更多时间处理更复杂的编程任务,并在更安全的工作环境中进行创新。
是的,OLP 能够通过生成精确的机器人程序来减少现场编程工作,从而最大限度地减少修改需求。例如,在 Visual Components OLP 软件中生成的程序是零错误的。在大多数情况下,只要使用了某种形式的缝线搜索功能,就完全不需要进行现场修改。
OLP 可帮助检测程序执行过程中出现的常见机器人问题。例如,利用 Visual Components OLP 软件中的碰撞检测和路径检查工具,您可以在工作站上轻松、高效地排查并解决可达性、关节限位、奇异点和碰撞等问题。
在考虑 OLP 软件时,请评估该软件是否能满足您当前及未来的需求,涵盖所有机器人品牌、工艺流程及复杂场景。在评估技术能力之后,还需重点考虑能否获得所需的技术支持,以确保实施和调试顺利完成。最后,请申请演示,亲自体验并试用该软件。
我们的客户是如何利用 Visual Components 进行机器人编程的?
MSK芬兰公司借助Visual Components的离线编程和制造仿真技术,推动机器人单元自动化及内部物流规划的发展
MSK芬兰公司通过使用Visual Components的机器人离线编程(OLP)和制造仿真软件,提升了机器人单元自动化和内部物流规划的效率。通过在虚拟环境中创建和验证机器人程序,......
阅读更多 →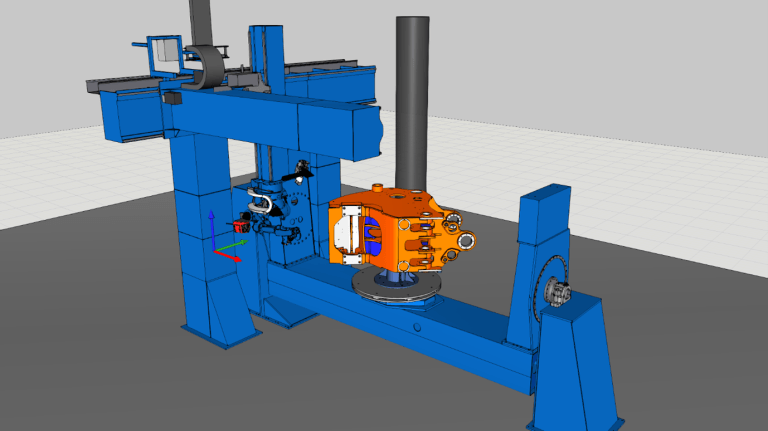
山特维克借助 Visual Components OLP 提升焊接自动化水平并缩短机器人编程时间
山特维克矿山制造公司生产重型地下装载机和卡车,其焊接工艺涉及复杂的多道焊缝。通过采用 Visual Components 离线编程软件,山特维克将机器人编程时间缩短了一半以上,并提高了焊接...
阅读更多 →
Ponsse 借助 Visual Components OLP 提升林业机械生产效率
作为全球领先的林业机械制造商,Ponsse 采用 Visual Components 机器人离线编程(OLP)软件来提升焊接生产效率,将机器人编程时间从 10 天缩短至 1 天,并...
阅读更多 →机器人编程的未来会是怎样的?
机器人编程的未来正受到若干关键发展的推动,这些发展有助于提升自动化水平、工作效率及协作能力。这一演变标志着从手动操作和孤立流程向更加集成化和智能化的系统迈出了重要一步。
掌握 Visual Components 中的机器人编程