重型机械, 工业自动化, 内部物流与仓储, OLP
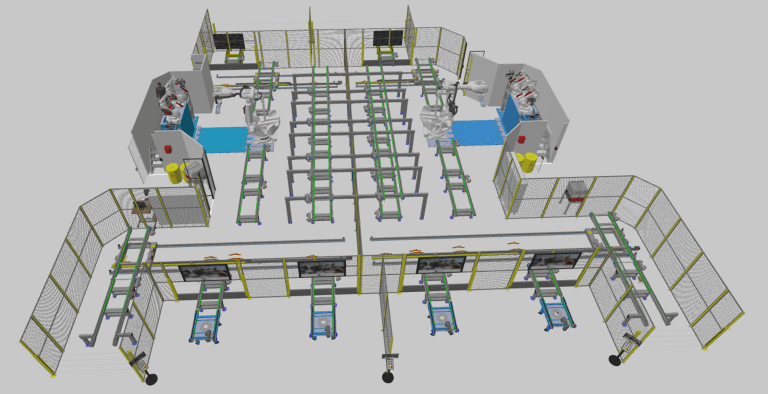
MSK芬兰公司借助Visual Components的离线编程和制造仿真技术,推动机器人单元自动化及内部物流规划的发展
MSK芬兰公司通过使用Visual Components的机器人离线编程(OLP)和制造仿真软件,提升了机器人单元自动化和内部物流规划的效率。通过在虚拟环境中创建和验证机器人程序……
产品
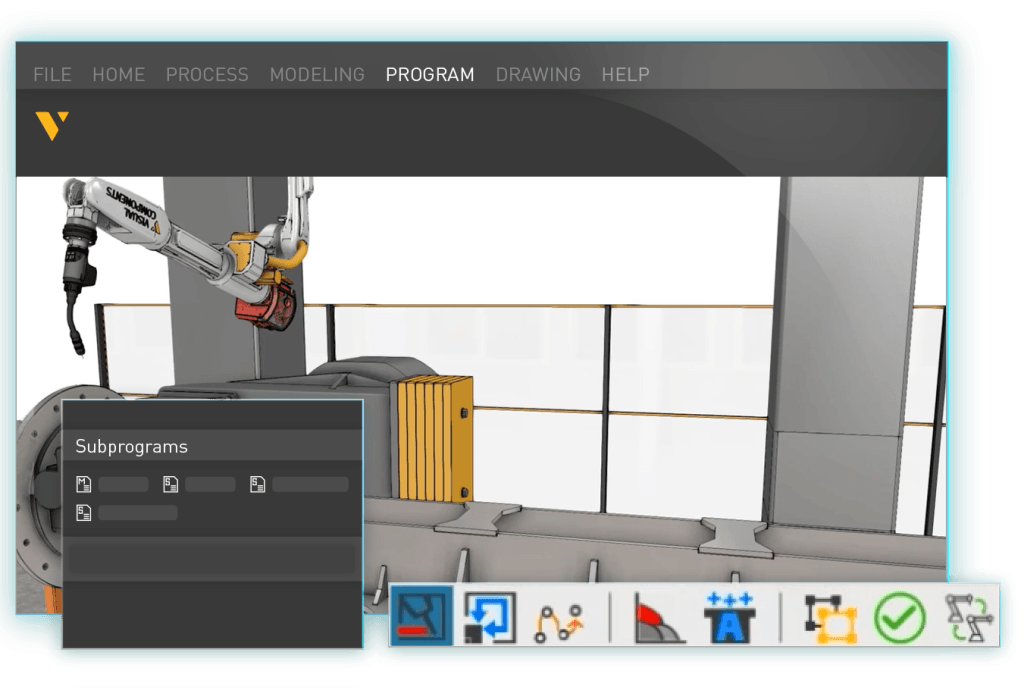
最快捷、最简便的机器人离线编程(OLP)软件。兼容主流工业机器人品牌、各类工艺及复杂度,助您最大限度提升产品质量、机器人利用率及产量。
编程速度提升10倍,且无需中断生产。无需编程技能。

一款旨在最大限度提升机器人系统利用率的软件,支持主流品牌、各类工艺及复杂应用场景。

准确且无误的程序已准备就绪,可随时在您的工艺知识库中重复使用。

提供经过市场验证的一站式解决方案,并与客户建立了长达数十年的成功合作关系。
机器人编程软件应当提升生产灵活性和适应性,而非因采用专有语言而加以限制。它应兼容任何机器人品牌、工艺或复杂程度,从而提高机器人利用率和产量。
借助我们内置的后处理器,您无需再使用多种软件或掌握多种机器人编程语言。这些后处理器兼容22个全球知名机器人品牌以及40多种机器人控制器。
不一致和错误会影响质量的重复性。机器人编程软件应确保从制造设计到生产全过程都能实现可重复的质量,同时兼顾精度并最大限度地减少浪费。
轻松校准机器人布局,实现虚拟与物理的精准对齐。让软件对程序进行验证和优化,从而消除代价高昂的生产错误、零件损耗和风险。
保存您的程序,以便日后随时在其他项目中重复使用或进行知识分享。
避免在最后关头对夹具和工装进行修改,确保生产过程顺畅,避免出现意外延误和风险。在实际生产开始前,应充分测试并调整生产布局的虚拟模型。
MSK芬兰公司通过使用Visual Components的机器人离线编程(OLP)和制造仿真软件,提升了机器人单元自动化和内部物流规划的效率。通过在虚拟环境中创建和验证机器人程序……
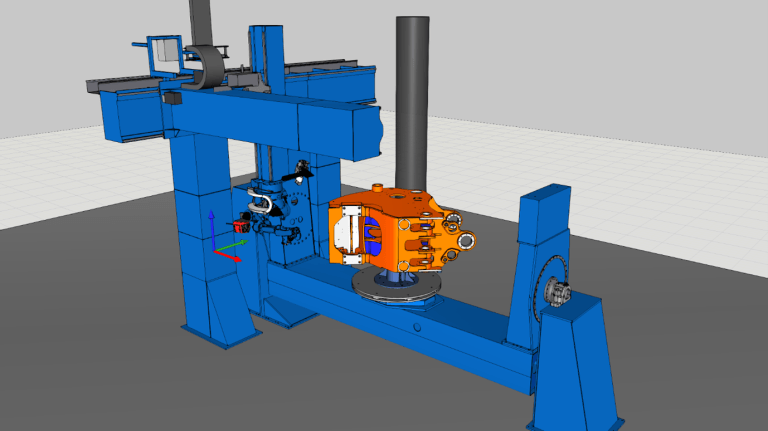
山特维克矿山制造公司生产重型地下装载机和卡车,其焊缝结构复杂且需多道焊接。通过采用 Visual Components 离线编程软件,山特维克将机器人编程时间缩短了一半以上,并提高了焊接……
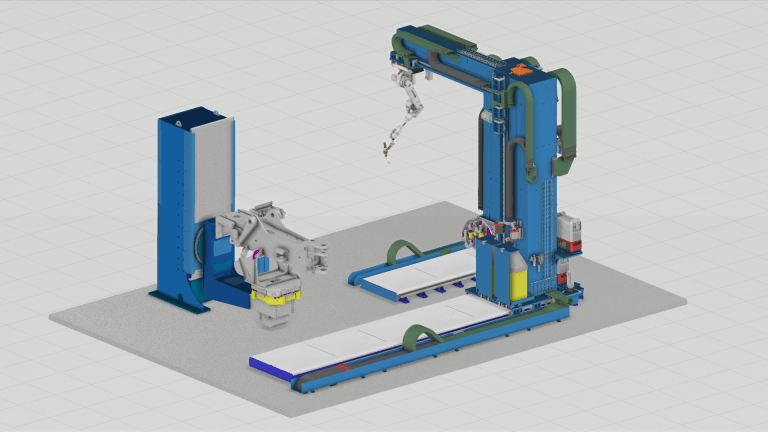
作为全球林业机械制造领域的领导者,Ponsse 采用 Visual Components 机器人离线编程(OLP)软件来提升焊接生产效率,将机器人编程时间从 10 天缩短至 1 天,并……
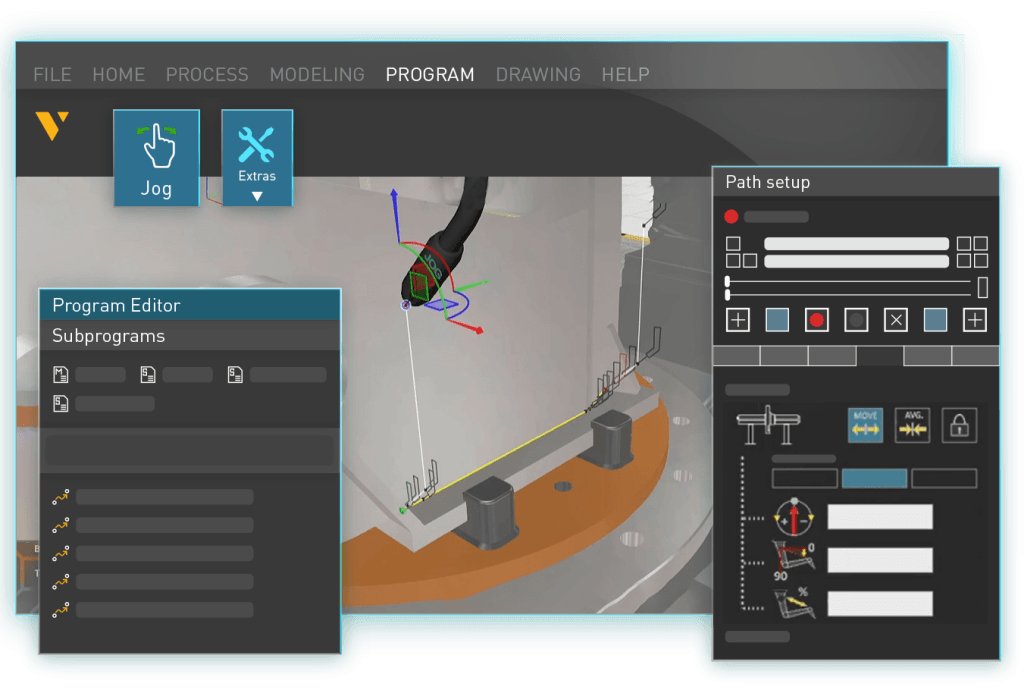
在 Visual Components 中生成的机器人程序没有错误,无需返工,尤其是在使用我们的缝隙搜索功能时。不过,如有必要,这些程序可以在示教器上自由修改、调整和验证。
凭借我们30多年的行业经验,我们将确保您的项目精准无误、圆满成功。OLP的有效性取决于布局的3D仿真模型(CAD模型和运动学)对实际工作单元的还原程度。为了准确捕捉工作单元的实际布局(而不仅仅是CAD中的呈现),用户必须执行一项称为“机器人单元实施与调试”的过程。我们将为您构建机器人工作站的虚拟布局,将其与实际机器人工作站进行校准,并测试机器人工作站上的各项功能是否正常运行。
在实施过程中,需要构建机器人工作站的3D布局,并配置初始信息以匹配实际的机器人工作站。同时,还需根据对实际机器人工作站进行的校准测量结果,对离线机器人工作站进行校准。工作站校准完成后,我们将与最终用户共同进行测试,以确保流程的有效性。根据机器人工作站的复杂程度,此过程通常需要4至8个工作日。
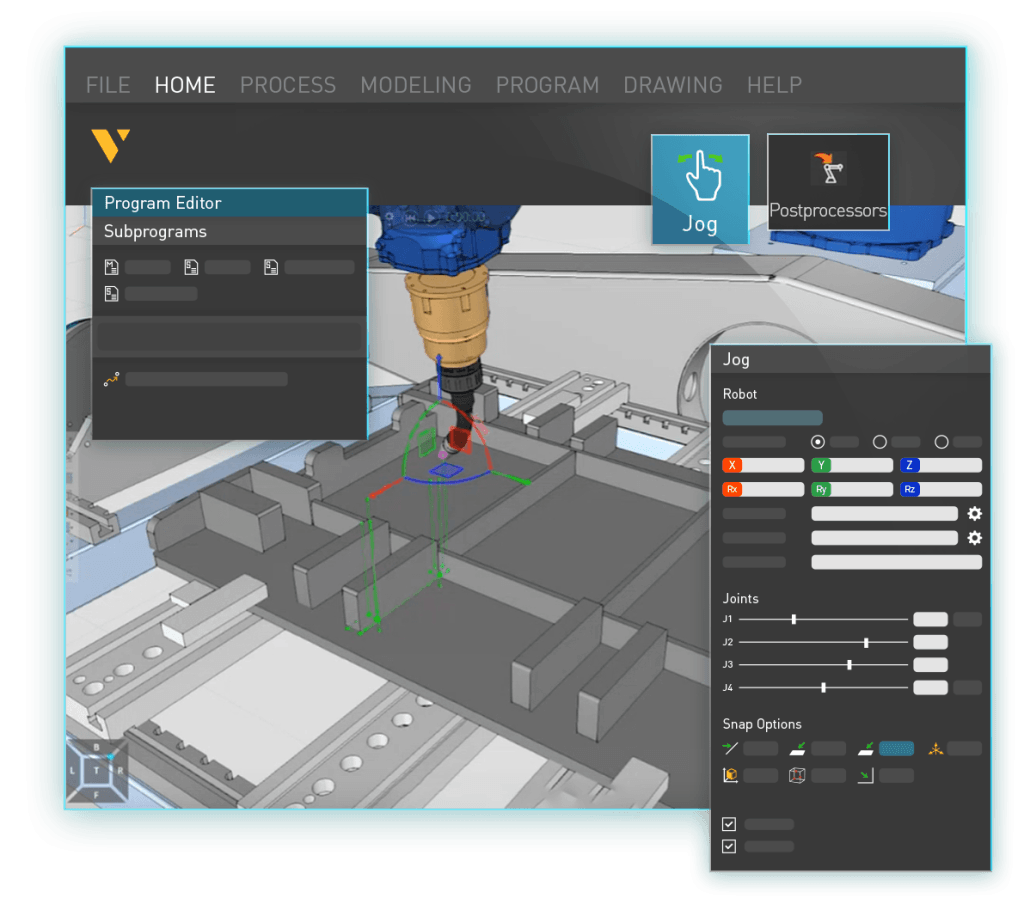
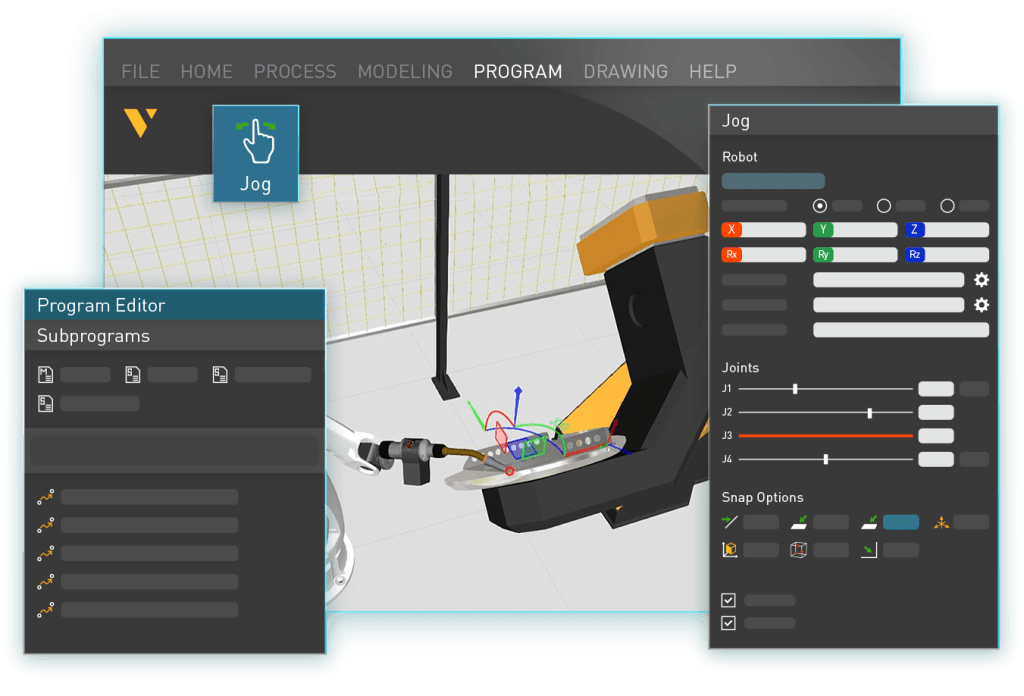
Visual Components OLP 软件采用拖放式界面,因此无需任何编程或 Python 知识。我们的一位用户此前毫无计算机操作经验,却成功利用我们的软件缩短了机器人编程时间。
是的,只需选择焊接语句,然后点击“多道焊”按钮,即可调整设置或使用预设来生成多层焊缝的程序。
当然可以,您可以在我们的电子目录中从3,000多个现成组件中进行选择,以此构建您的布局。我们的软件能够应对任何复杂程度的需求。
在 Visual Components OLP 软件中,您可以设计任意复杂程度的机器人系统布局,且不受总轴数限制。这种灵活性使得系统能够集成辅助轴和外部轴、多轴工件定位器以及装配门架。
凭借我们的交钥匙解决方案,我们将提供所有必要的培训和支持,以确保项目圆满成功。这包括交付软件许可、提供软件校准和调试服务以确保与客户的机器人工作站兼容,以及为最终用户提供培训。此外,我们还提供持续的技术支持、新版本更新、详尽的用户手册,并开放在线学院和外联网平台,以支持自主学习。
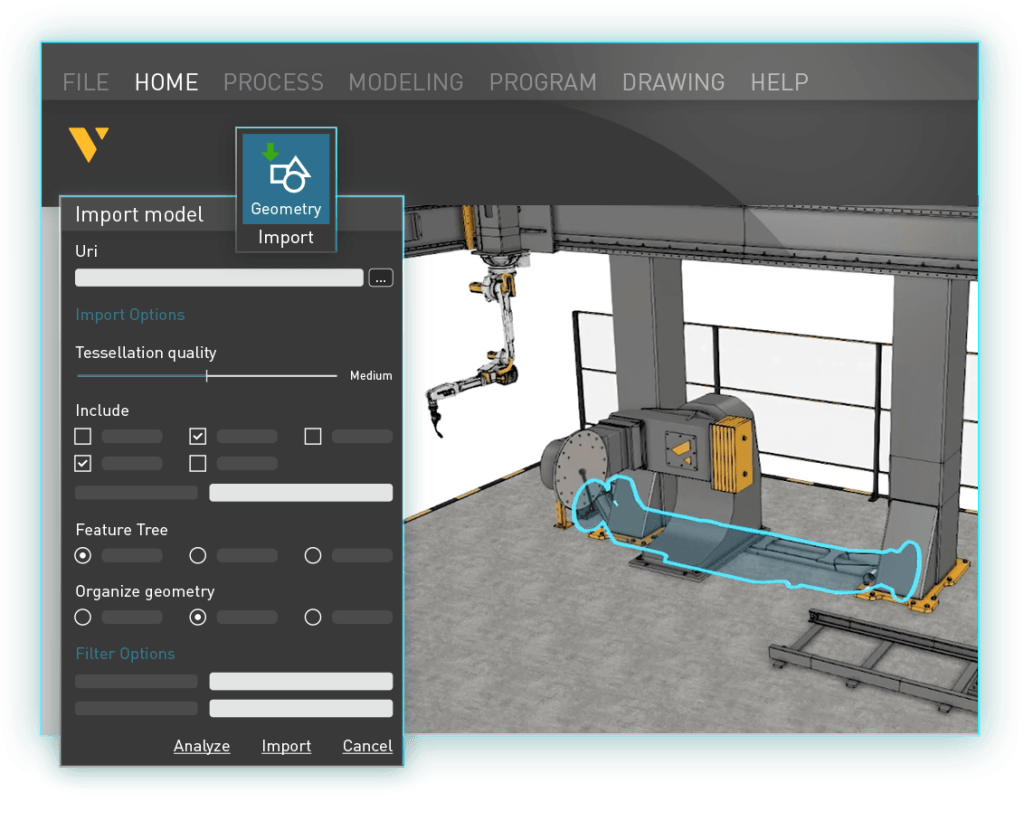
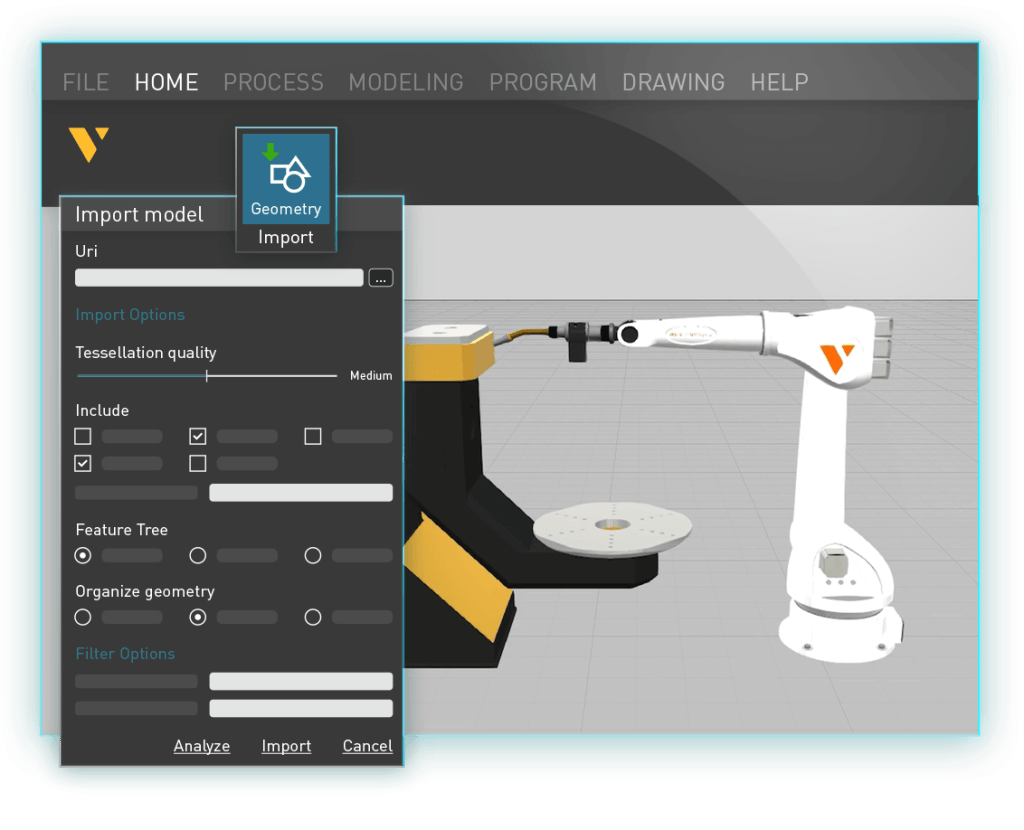
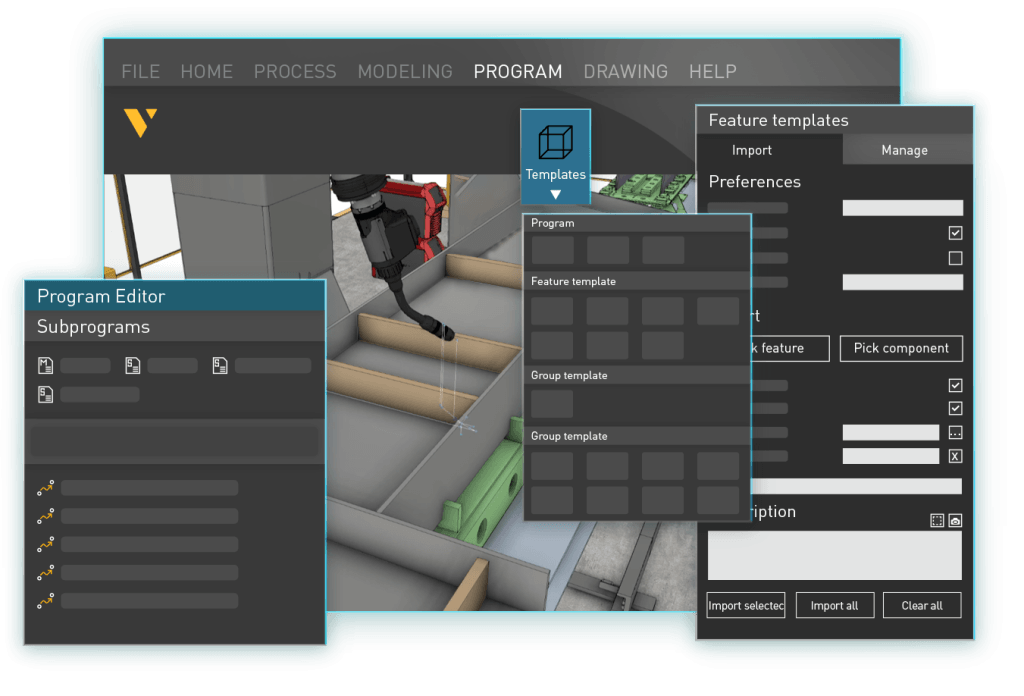
利用易于使用的建模功能,设计并模拟真实的制造应用。您可以从零开始创建 3D 几何体,导入现有的 CAD 数据,或修改我们库中任何可用的组件,并将它们转换为可用于仿真的模型。
需要对 CAD 模型进行相交、并集或差集运算吗?我们的布尔建模功能可满足您的需求。轻松修改 CAD 几何体,以进行高级仿真。
借助我们预先构建的功能插件,简化您的组件开发流程。只需提供简单的输入,我们的工具便会自动配置组件的行为。
节省时间,快速将您的 CAD 文件应用到 3D 环境中。借助我们的建模工具包,您可以在 Visual Components 内轻松构建新的 3D 几何体或更新导入的 3D 模型。
通过简化模型并去除不必要的细节,提升仿真性能。享受更小的文件大小和更快的仿真速度。
通过行业标准协议 OPC UA 和 MQTT 将您的仿真与控制系统连接起来。
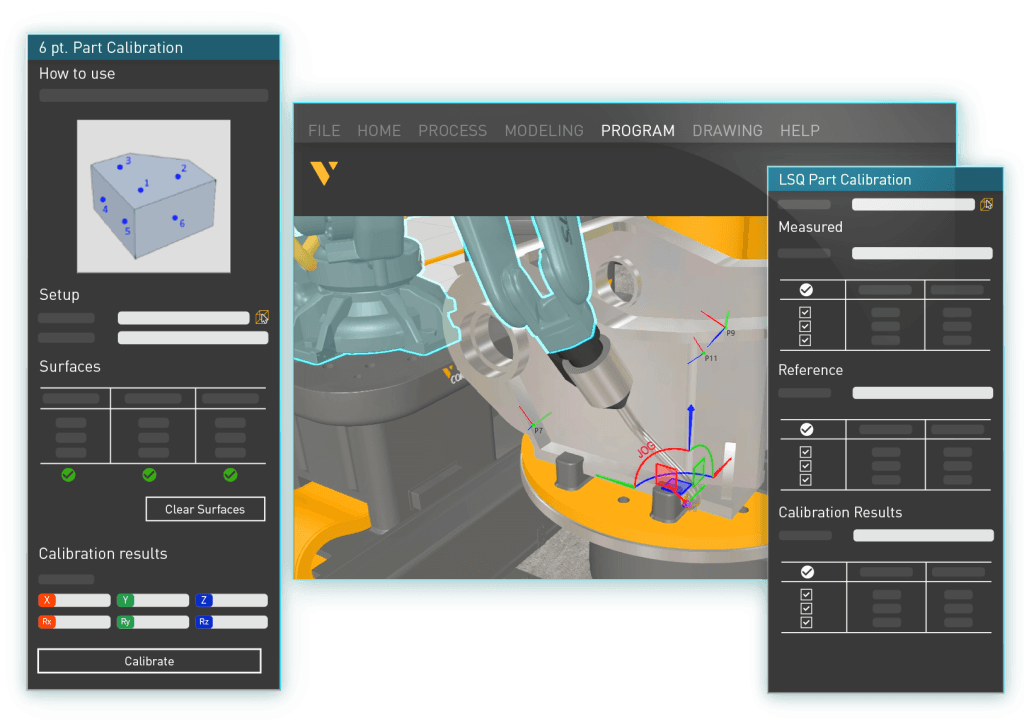
利用直观的校准工具(包括机器人间校准)自行配置机器人单元。通过引导式操作指南和详细报告,对机器人、外部轴和工件定位器进行精确校准。将虚拟布局与实际布局相匹配,确保机器人程序运行精准,从而加快投产进程。
借助直观、易于使用的界面,优化您的校准流程,助您取得成功。
即时获取校准结果的分析与报告,最大限度地减少现场故障排查的时间。
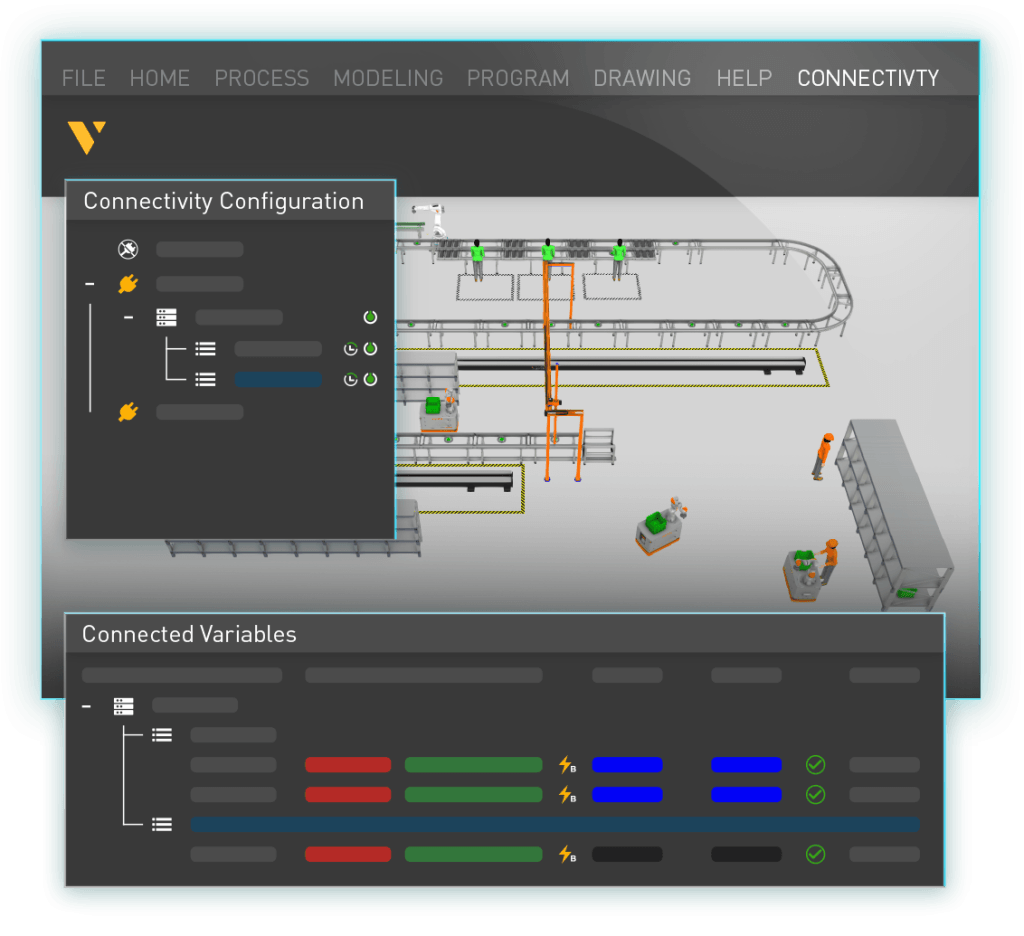
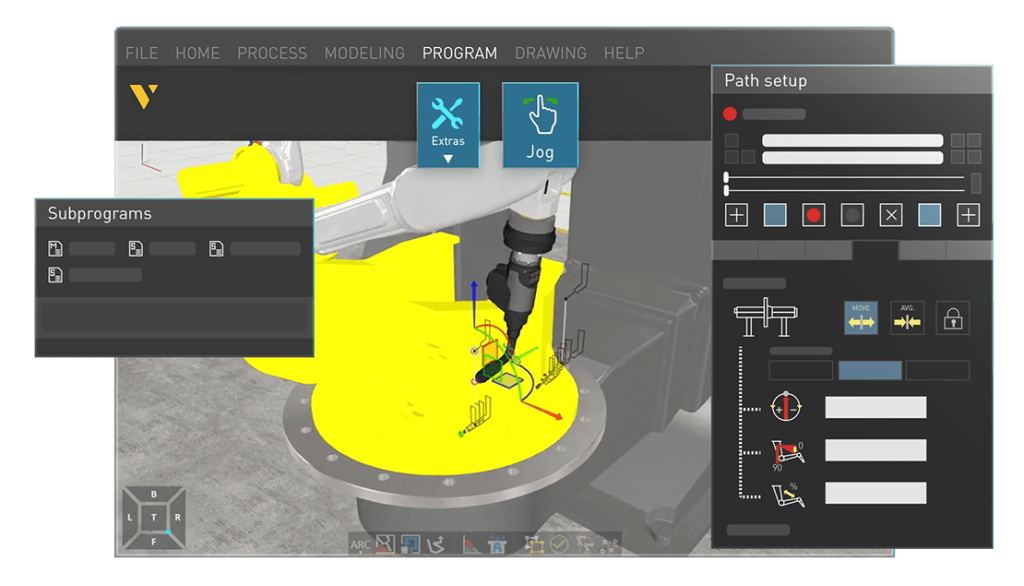
将您的仿真与各种物理和虚拟的厂商专用控制器相连接,借助强大的可视化功能来规划、调试和验证您的程序,并提升虚拟调试的可能性。
使用 Visual Components 机器人程序编辑器,通过 KUKA 机器人语言 (KRL) 对 KUKA 机器人进行编程。将您的项目无缝传输至 KUKA 虚拟控制器(KUKA.OfficeLite)和物理控制器。借助精确的循环时间、精准的机器人路径以及先进的碰撞检测功能,提升您的虚拟调试体验。
通过相应的物理控制器或机器人软件,将您的仿真直接连接至ABB、斗山、发那科、川崎、欧姆龙和安川机器人。利用精确的循环时间和机器人路径验证您的程序,并远程监控制造系统的运行状况,从而确保最佳的效率和精度。
Beckhoff ADS 插件允许您将正在运行的 Beckhoff TwinCAT PLC(版本 2 或 3)与已加载的程序连接起来。
西门子 S7 PLC 连接功能支持与大多数物理和模拟的西门子 PLC 进行原生连接,包括旧型号。这种原生连接确保了与物理 S7-1200 控制器之间的通信速度更快,并支持连接到 S7-PLCSIM。
WinMOD 和 SIMIT 连接插件支持与多种物理和虚拟自动化系统进行通信。通过连接多家厂商的专用控制器,您可以验证 PLC 程序和机器人运动学。SIMIT 连接功能为您打开了通往西门子全系列自动化系统的大门,包括 PLCSIM Advanced、PLCSIM、虚拟控制器、SIMIT UNIT 以及 PLC。
通过以FBX格式导出设计,可快速创建并分享作品。该功能支持导出3D对象的骨骼和关节限制。此外,您还可以导出动画,从而以更生动、更具互动性的方式展示您的设计。
无论您是想寻找一款用于编程机器人的工具,还是希望快速设计并展示生产解决方案,我们都能满足您的需求。欢迎了解我们的3D制造仿真和机器人离线编程产品系列。
借助这款最快、最简便且兼容性广泛的离线编程软件,最大限度地提升质量、机器人利用率和产量。
为特定应用设计您自己的仿真模型。精确编程机器人并自主调试机器人单元。
借助这一完整的仿真和离线编程解决方案,将您的虚拟项目变为现实。
正在寻找仿真工具吗?快来看看我们提供的各类 3D制造仿真软件软件。